
Hi, I'm Katherine, a recent grad from Olin College of Engineering based in the bay area CA. I am a software engineer and love to dig into challenging problems in computer vision, machine learning, and robotics. Beyond software, I also love dabbling in anything from CAD and manufacturing to user centered design. Outside of engineering I am an aspiring ceramic artist (among other mediums), and enjoy spending my time in the studio making small animals or large bowls. When not working, you can find me playing my favorite abba songs or rehearsing for a musical on piano, sketching portraits of my friends, or going thrifting for new secondhand treasures.
Trail Tracking
We set out to retrofit an existing remote controlled vehicle into an autonomous outdoor navigation system using an Arduino, Raspberry Pi, smartphone running an AR app, and ROS2. Our hope was to design a system which enabled our vehicle to autonomously navigate forest trails. I worked primarily on the machine learning algorithm.

Manic Moth
For my senior engineering capstone, I co-founded a projection mapping tooling startup. I conducted user research, identified problem niche in entry-level tooling, and worked to develop out business model. On the technical side, I designed auto-segmentation mapping tooling in Python and OpenCV as well as built a demo app.
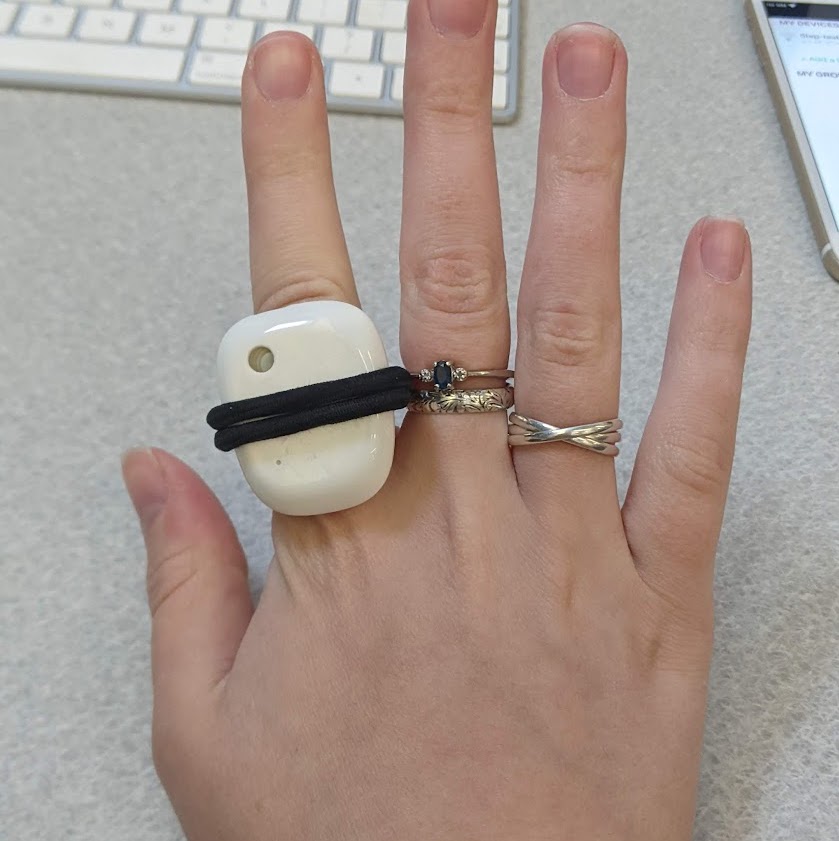
STEP
I was part of the founding class of Social Technology Enterprise with Purpose, an experimental course at Olin College. Our goal was to build accessible technology to enable blind and visually impaired users to use mobile devices more effectively. I worked on a ring which detected gestures as well as business organization and user testing.
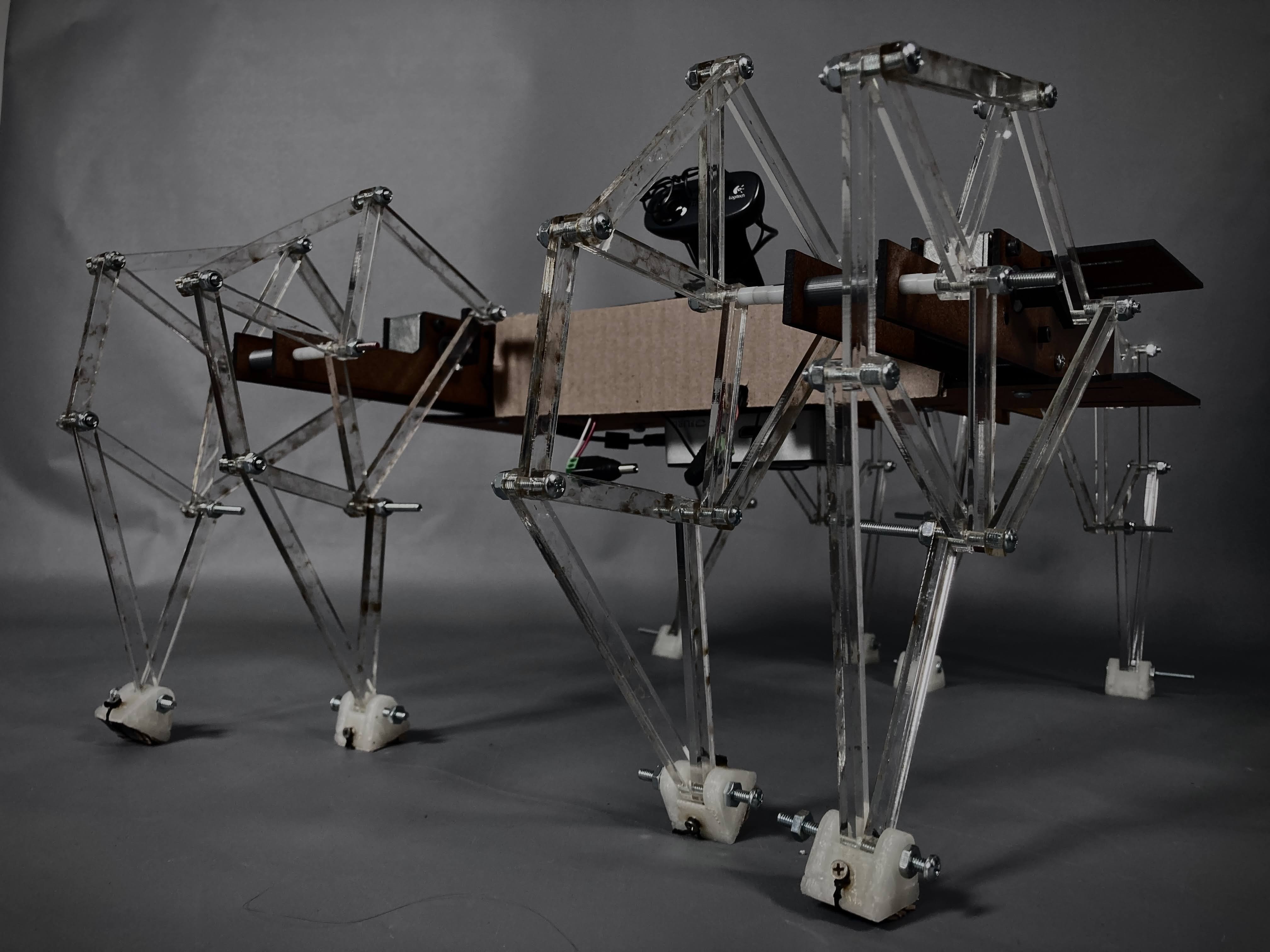
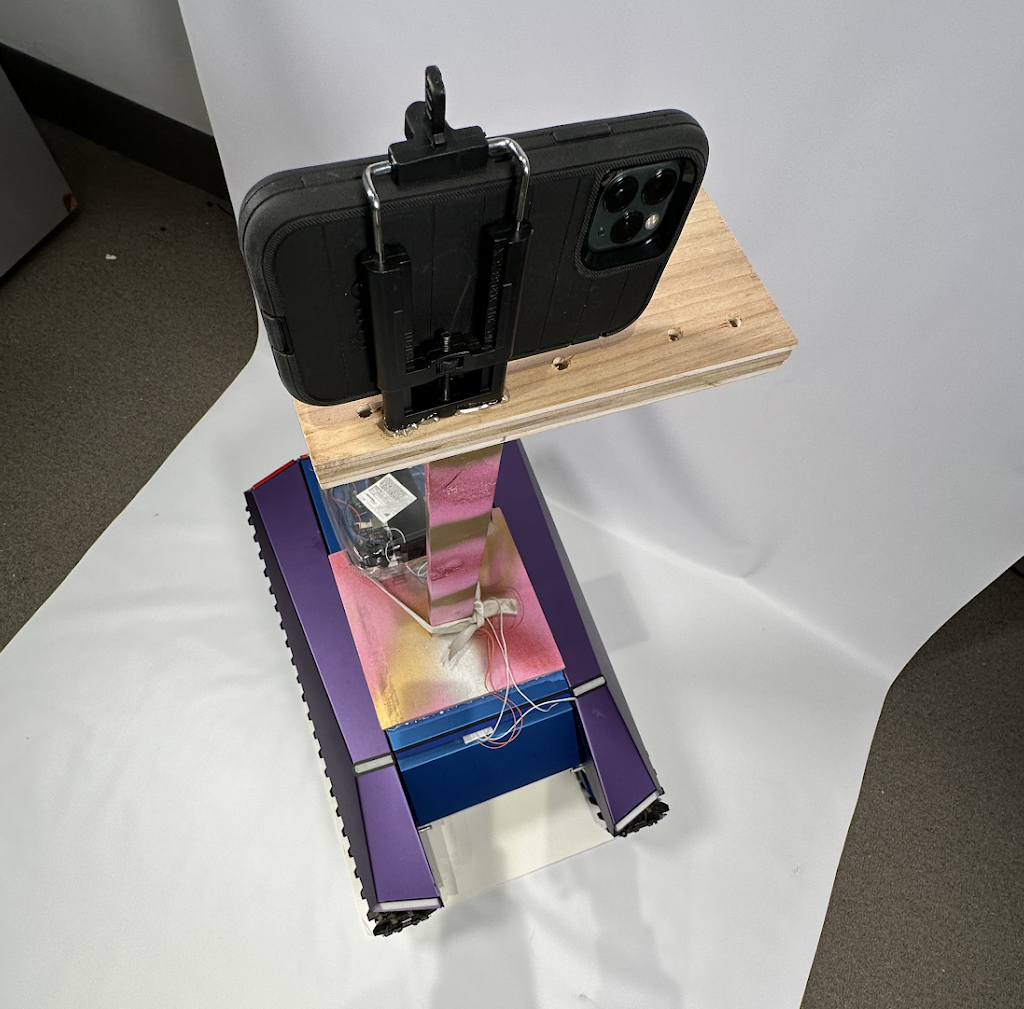
Powered Strandbeest
This project was for my Principles of Integrated Engineering class, in which we had to create an integrated robotic system with significant mechanical, electrical, and software components. My team built a motor powered walking Strandbeest, which had a vision system which allowed it to follow a person around. I worked primarily on the software for the project, but also helped with overarching design decisions throughout the process.

Generating Abba Music
For this project, my teammate and I wrote a high level overview of what LSTM Networks are as well as a walkthrough of an implementation of how they can be used to generate music. We specifically chose to create new Abba music using a database of midi files. The project includes the theory and math behind the LSTM, along with its relation to our dataset, and how we worked to optimize our algoritm after understanding the theory.
Human Avoidance Cobot
This was a project at Southwest Research Institute. The overall objective was to develop a robot motion planning system that responds to the position of a human in real-time. I contributed to the integration of the system - working on communication between the human motion capture system and the real-time path planning system. I worked with ROS and C++ to create the human model in the path planning collision model shown above.
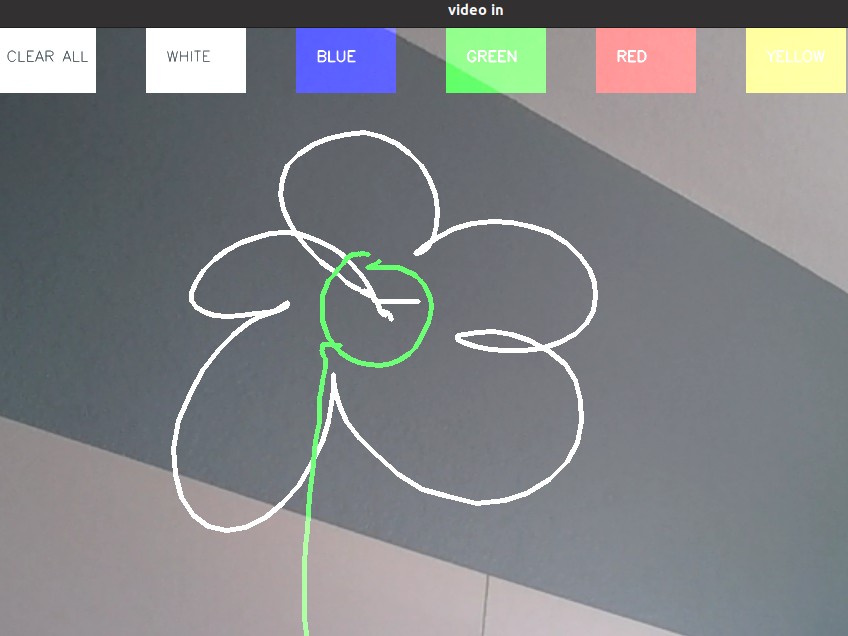
OpenCV Painting
Our project goal was to use C++ and OpenCV to get input from a user, and use that input to perform a task. We tracked a color target to allow the user to "paint" in the air. We included various painting options, including allowing the user to select different colors and line thicknesses. We explored tracking a users hand, but found that our accuracy and runtime were not high enough for our end application.
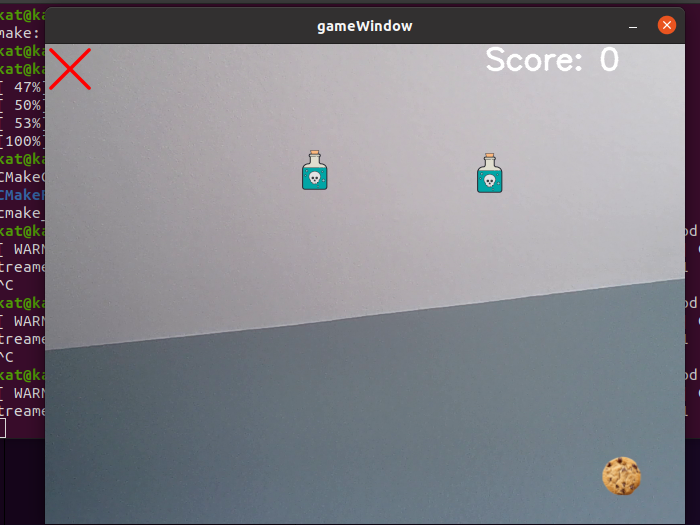
Food Fest Game
This is an OpenCV food catching game utilizing dlib for face identification. The game identifies any faces within a webcam frame and uses that information to let players "eat" food images on screen. The main game premise has food, poison, and hearts which fall from the top of the screen. The player must catch food, and avoid poison, otherwise they lose a life. The player loses once all lives are lost.

Cube Tracking Robot
Used opencv to track yellow game pieces as part of a project for FIRST Robotics Team 1511. Isolated the largest cluster of pixels that were within the yellow color range to identify the nearest cube, and then used the position in the frame to adjust the robot path to the game piece, updating the speed based on the distance to the target. This would allow the robot to autonomously aquire game pieces during a match.